de ilk kez kullan>lm>flt>r. Daha sonra prostat cerrahisinde de
kullan>lan PUMA ile birlikte daha özelleflmifl robotlar>n yap>m>
bafllam>flt>r.
prostat cerrahisinde kullan>lmak üzere spesifik olarak dizayn
edilmifltir. PROBOT'ta özel ultrasonik uç sayesinde prostat do-
kusu flekillendirilmekte ve yeterli miktarda organ>n ç>kar>lma-
s>na imkan sa¤lamaktayd>. Bundan dolay> prostatektomi ilk
gerçek robotik cerrahi operasyon olarak kabul edilebilir.
tioning), Amerika'da dizayn edilmifltir. AESOP'ta amaçlanan
cerraha operasyon s>ras>nda görüntü üzerinde kontrol imkan>
sa¤lamak ve kameray> tutmas> gereken asistan ihtiyac>n> orta-
dan kald>rmakt>. Cihaz kameray> tutmakta ve cerrah>n ses ko-
mutlar> ile hareket etmekteydi. Mettler ve arkadafllar>n>n yap-
m>fl oldu¤u bir çal>flmada jinekolojik cerrahide AESOP kullan>-
larak yap>lan operasyon ile cerrahi asistan>n kamera tuttu¤u
operasyon karfl>laflt>r>lm>fl ve AESOP kullan>lan cerrahilerde
operasyon süresi daha k>sa bulunmufltur. Bunun nedeni olarak
da iki cerrah>n da operasyon esnas>nda kameray> tutmalar>na
gerek kalmadan iki elini kullanabilme imkan> gösterilmifltir.
AESOP ile birlikte abdominal robotik asiste operasyonlar>n ya-
p>lmas> mümkün hale gelmifltir. 1994 y>l>nda FDA ilk kez intra
abdominal cerrahi için robot kullan>m>n> onaylam>flt>r. 1992
y>l>nda di¤er ticari robotik cerrahi sistemi olan ROBODOC or-
taya ç>km>flt>r. ROBODOC kalça protezi operasyonlar>nda 3
boyutlu bilgisayarl> tomografi görüntülerini kullanarak femur
üzerinde hassas kesiler yapmak için dizayn edilmifltir. ROBO-
DOC ve AESOP ile yap>lan cerrahilere gerçek anlamda robotik
cerrahi demek do¤ru de¤ildir çünkü yap>lan cerrahinin sadece
bir k>sm>nda robot yer almaktayd>. Bundan 4 y>l sonra ikinci
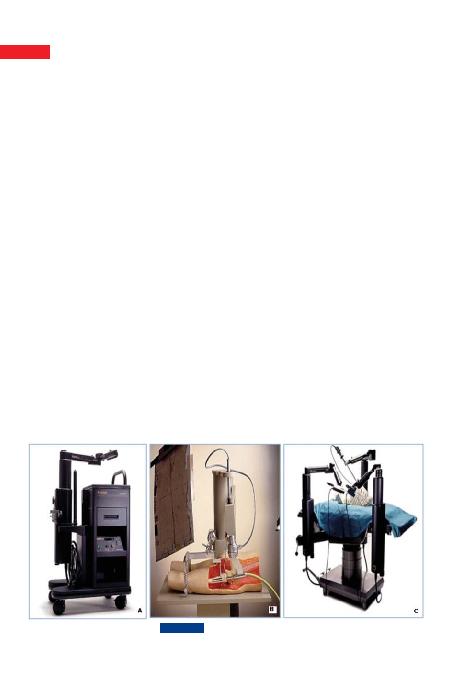
Inc, Santa Barbara, Ca, USA) ortaya ç>km>flt>r (fiekil 106-1).
ZEUS'ta iki robotik kol ile bir kamera tutucusu bulunmaktay-
d>.
temdi. Kamera AESOP'takine benzer olarak cerrah>n ses ko-
mutlar> ile hareket etmekteyken, hastadan uzak bir alanda bu-
lunan cerrah enstrümanlar> robot yard>m>yla kontrol etmek-
teydi. Bu sistemde geleneksel 2 boyutlu laparoskopik ekran bu-
lunmaktayd>. Zeus sistemi kullan>larak New York'taki bir cer-
rah, Fransa Strazburg'taki hastada kolesistektomi yapmay> ba-
flard>. Bu cerrahinin öncesinde fiber optik kablolar yard>m>yla
transatlantik olarak önce domuzlar üzerinde çal>flmalar yap>l-
m>flt>r.
l>nda Belçika'da da Vinci® robotik sistem kullan>larak ilk bafla-
r>l> cerrahi gerçeklefltirilmifltir.
art>k mevcut de¤ildir. 2003 y>l>nda Computer Motion flirke-
tinin Intuitive flirketine dahil olmas>yla beraber piyasada tek ti-
cari robotik sistem da Vinci® cerrahi sistemi olmufltur. Loul-
met ve ark. 1999 y>l>nda kardiyotorasik cerrahide da Vinci® sis-
temini kullanarak ilk cerrahi operasyonlardan birini gerçeklefl-
tirmifltir. Koroner arter bypass graft için robotik asiste sistem
kullanm>fllar ve robotik asiste cerrahi geçiren hastalar>n hasta-
nede kal>fl sürelerinin daha k>sa oldu¤unu, sternotomiye göre
yo¤un bak>m ünitesinde daha az kalma ihtiyaçlar>n>n oldu¤u-
nu göstermifllerdir.
n> giderek artm>flt>r.
gili bildirilerinden sonra FDA jinekolojik alanda robotik siste-