2004 y>l>nda koroner vaskülarizasyon ve 2005 y>l>nda jinekolo-
jik operasyonlar için FDA taraf>ndan onaylanm>flt>r. A.B.D'de
FDA onay>ndan sonra özellikle ürologlar taraf>ndan h>zla kul-
lan>lmaya bafllanan bu teknoloji ile radikal prostatektomilerin
ço¤u robotik asiste gerçeklefltirilmeye bafllanm>flt>r. Jinekolog-
lar>n bir k>sm> robotik cerrahi e¤itimi ald>ktan sonra h>zl> bir
flekilde bu yeni teknolojiyi kullan>lmaya bafllam>fllard>r.
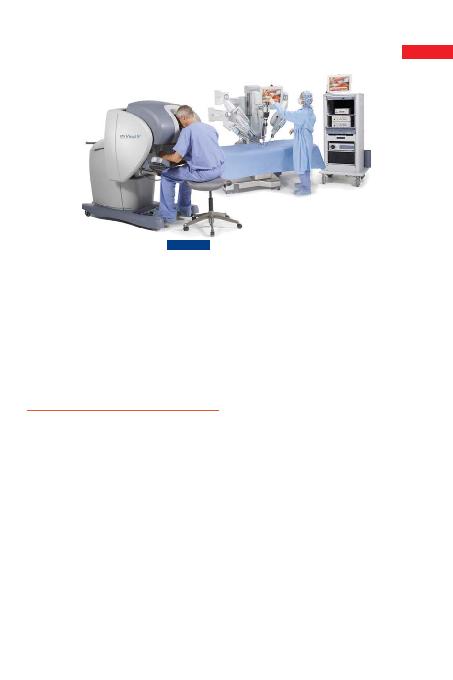
USA) flu an piyasada bulunan en geliflmifl ticari robotik cerrahi
sistemdir. Da Vinci® robotik sistem 3 ana parçadan oluflmak-
tad>r. Birinci parça cerrah>n oturdu¤u konsoldur. Cerrah ergo-
nomik biçimde tasarlanm>fl konsola oturarak uzaktan robotik
sistemi kontrol etmektedir. Konsol ameliyathane içerisinde ve-
ya d>fl>nda herhangi bir yere kurulabilir. Operasyon esnas>nda
cerrah konsola yans>t>lan stereoskopik görüntüyü kullanarak,
el ve ayak manüplatörleri sayesinde robotik kollar> kontrol
edebilmektedir. Cerrah>n oturma pozisyonu en uygun el-göz
koordinasyonu sa¤lamaya yöneliktir. Robotik sistemde taktil
feedback olmad>¤>ndan cerrah sadece görsel feedbacke güven-
mek zorundad>r. Ancak bu sorunu da ortadan kald>rmak ama-
c>yla yeni silikon bazl> pnömotik balon ve piezoelektrik güç
sensörleri kullan>larak cerraha operasyon esnas>nda taktil feed-
back alg>s>n> verecek sistemler gelifltirilmektedir.
Insite Vision System® denilen görsel sistemdir. Robotik sistem-
de kamerada iki lens olmas>ndan dolay> binoküler görüfl elde
edilir. Üç boyutlu görüntü iki kamera, iki >fl>k kayna¤>n>n tek
bir ünitede birlefltirilmesi ile oluflturulmufltur. 12 milimetrelik
alan>n> 6 ile 10 kat büyütme özelli¤ine sahiptir. Üç boyutlu gö-
rüntü sayesinde mükemmel görsellik sa¤lan>r ve dokunma
duyusu olmadan bile mükemmel ince hareketler yapabilmek
mümkün hale gelmektedir. Robotik sistemde ayn> zamanda
High Definition (yüksek çözünürlüklü) görüntü elde etmek de
mümkündür. Görüntü cerrah taraf>ndan istenildi¤i zaman bü-
yütülüp küçültülebilir. Üçüncü k>s>m ise patient-side cart deni-
len robotik kollar>n oldu¤u k>s>md>r. Da Vinci®'nin ilk serile-
rinde üç robotik kol bulunurken yeni kuflak robotlarda dört
kol bulunmaktad>r. Endowrist® enstrümanlar ad> verilen alet-
ler robotik kollara yerlefltirilir (fiekil 106-3). Bu enstrümanlar
sistemin kilit parçalar>d>r. Robotik enstrümanlar el bile¤i hare-
ketlerini 7 df serbestlikle taklit edebilecek flekilde tasarlanm>fl-
t>r. Bu hareketler içeri ve d>flar>, aksiyel rotasyon, enstrüman>
açma ve kapama hareketi, artikülasyonda lateral, vertikal, sa¤a
ve sola harekettir. Bu nedenle aletlere bilekli enstrümanlar da
denmektedir. Konvansiyonel laparoskopide ise sadece 4 df ser-
bestlik söz konusudur. Laparoskopide cerrah sadece açma, ka-
pama, saat yönü ve saat yönünün tersinde çevirme hareketleri-
ni gerçeklefltirebilmektedir. Bilgisayar tabanl> teknoloji sayesin-
de konsola oturan cerrah, master denilen halkalara bafl ve ifla-
ret parma¤>n> yerlefltirerek ve ayak pedallar> ile kontrol sa¤laya-
rak hasta üzerindeki patient-side cart'a ba¤l> enstrümanlar> ra-
hatl>kla kontrol edebilmektedir. Motion scaling (1:10) denilen
sistem sayesinde çok ince hareketlerin yap>lmas> mümkündür.
Bilgisayar yaz>l>m> sayesinde fizyolojik tremor filtrelenir ve
konvansiyonel laparoskopideki ters fulcrum etkisi ortadan kal-
d>r>lm>fl olur. Yap>lacak olan cerrahinin çeflidine göre de¤iflik
enstrümanlar vard>r. Bilgisayar yaz>l>m> robotun çal>flmas>nda
önemli oldu¤u kadar, birçok güvenlik özellikleri sayesinde gü-
venli ameliyat yapma imkan> vermesi bak>m>ndan önemlidir.
Ameliyat ekibi aras>nda iletiflimi sa¤layacak ses sistemi de mev-
cuttur.